
水下智能控制与无人观测技术
发布人: webmaster
发布日期:2022-07-01
研究环境自适应水下自动控制与导航定位技术,研究跨介质空海一体化光声图像获取与自动识别技术,研发新型水下低功耗、长航程无人航行器,发展基于异构平台的无人组网观测技术,为海洋环境监测与水下目标探测提供可靠平台保障。
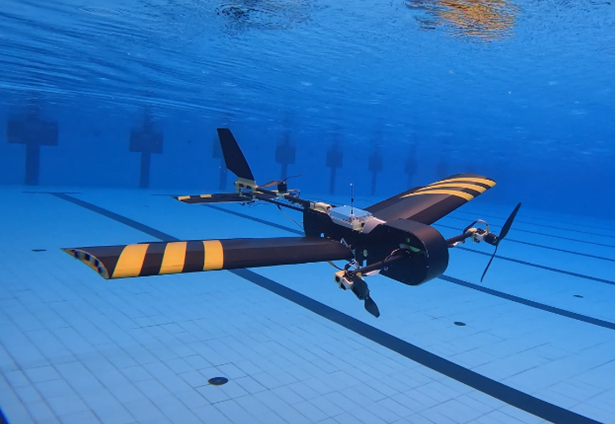

(a)海鹰系列跨介质航行器 (b)“红鹳1号”气垫无人艇


(c)基于波浪能的长航时无人艇 (d)多无人航行器协同原理样机


(e)便携式水下机器人 (f)光学探测水下机器人
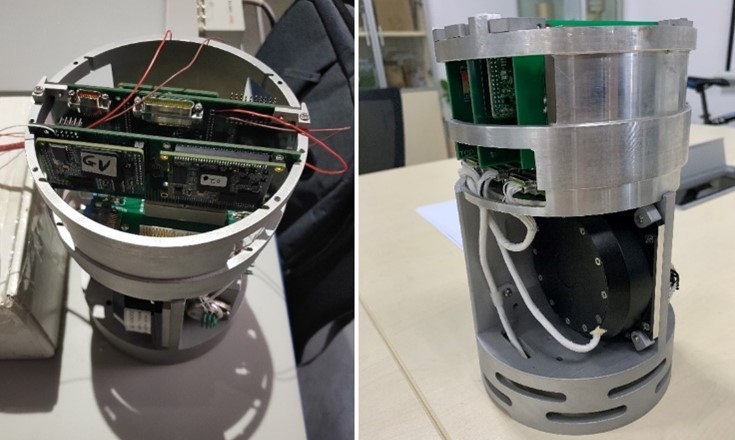
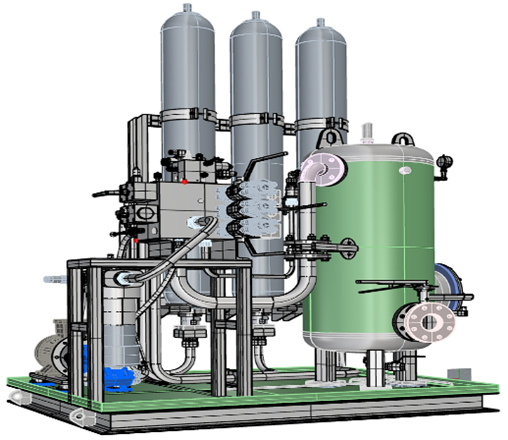
(g)水下高精度光纤惯导 (h)波浪能发电液压系统
主要研发涵盖空、海、岸等多域/跨域的无人智能装备与创新技术。

